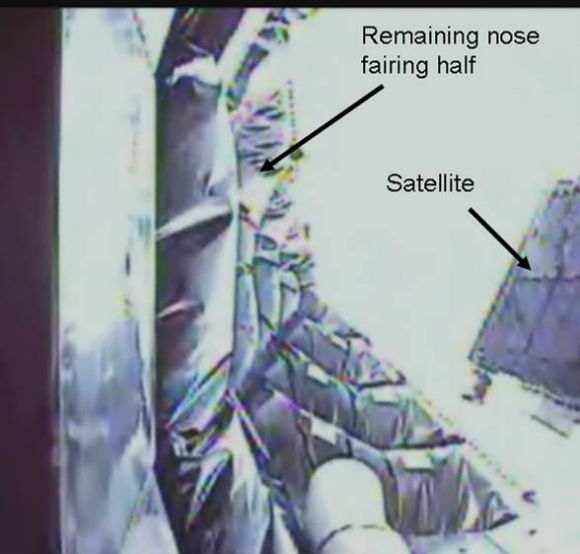
A portion of the Naro-1’s payload can be seen in the low right hand corner of this frame of the payload rocketcam. Half of the clam shell nose fairing remains in the left half of the image.
Today’s techno-wonk exploration of last year’s Naro-1’s failure is only made possible by the brilliant internet searching of Josh Pollack. (Thanks, Josh!)
Last year, South Korea failed in its attempt to orbit a satellite using a Russian liquid-propellant first stage and an indigenously designed and manufactured solid-propellant second stage. In preparation of the June 9th second attempt, the South Korean space agency released a video of selected rocketcams of that first launch. The ROK space agency said that the video had not been released earlier because of concerns about how it would effect relations with Russia (which supplied the first stage) and for security reasons. Its hard to see how either reason makes sense. Nevertheless, the video does reveal some interesting tidbits about the ROK’s guidance capability, the subject of this post.
The second stage separates from the first stage some time after the first stage has burnt out and considerably after the nose fairing failed to separate cleanly.
When the nose fairing failed to separate, at 216 seconds after launch, it left a slight mass imbalance between the “left” and the “right” halves of the rocket. However, the first stage continued to burn for several tens of seconds. The rocketcam showing the separation of the first and second stages clearly shows that the second stage was not tumbling at the time of separation. Thus, the Russian first stage was easily able to accommodate the relatively slight mass imbalance. (Because of the first stage’s large mass, the half clam shell that remained caused, proportionately, a considerably smaller fractional mass imbalance than it would for the lighter second stage.) The next portion of the video shows the ignition of the second stage and shows the start of a very interesting oscillation.
The solid-propellant second stage ignites and immediately induces an oscillation in the direction of the rocket. The Naro-1 was never able to recover and, in fact, the oscillations gained in amplitude until the rocket was tumbling out of control. (Note the slight shifts on the nozzle with respect to the rest of the motor. That’s TVC in action.)
As regular Wonk readers will know, I have a fascination with thrust vector control and this oscillation is directly related to the guidance system (as it determines the direction of flight and possibly the attitude of the rocket). The second stage of the Naro-1 uses a flexible nozzle where four hydraulic jacks pull the nozzle to one side or another as the guidance system determines which small offset in the thrust direction would counter any small perturbation.

The Naro-1’s second stage is shown here. The dark tube is the solid-propellant motor casing and the cone on the left is the motor’s nozzle. The white coverings attached to both the nozzle and the bottom of the second stage house the hydraulic jacks that maneuver the direction of the nozzle for thrust vector control.
In principle, it should be possible for a guidance and control system to damp out the oscillations (see the animation below that was taken from the South Korean video) induced by the mass offset and arrive at a new average direction for the nozzle. This offset would probably change with time as the propellant from the motor is used. However, the Naro-1 was not able to do this. Why this is so is a matter for speculation.
One possibility is that the guidance system is not sensitive enough to detect the drift in direction early enough to counter act the effect of a change in the mass axis (remember, we said that the direction through which the thrust must pass through to “balance” the rocket changes as the propellant is burned). Instead, it must—under this hypothesis—wait until the direction of travel has changed enough to be detected. At that point, the TVC system must compensate to a larger extent and might actually overshoot. This overshoot behavior is actually fairly common in guidance algorithms. But there is normally a mechanism built in to damp out the errors. Under this hypothesis, this damping is missing for this sort of malfunction.
I, of course, await the alternative ideas and comments of our wonk-readers.

The clamshell bites back!
Amazing, how many things can go wrong.
First of all, i must say that the real show-stopper in case of the Naro-1 certainly was the additional weight of the partially non-separated fairing, not that oscillation. This unplanned increase in inert mass on the upper stage definitely spoiled the mass-ratio (consider the tiny payload and small overall-mass of the rather underdimensioned upper stage in comparison to the almost laughably overdimensioned mostly empty payload shroud – let’s just say that there is a lot of built-in growth-potential…), most likely to an extent that orbital velocity was not attainable anymore.
But this oscillation is interesting nonetheless (and indeed may point at an additional flaw in the launcher’s guidance/steering system). If that upper stage would be liquid fueled, then i’d suspect (excessive) sloshing in the tanks (see e.g. the second flight of the Falcon-1). But since that upper stage is solid-fueled, i find it somewhat hard to fully understand why such a ‘stationary’ mass imbalance would cause such a ‘dynamic’ oscillation – unless they didn’t take the second derivative of the corresponding angular deviation into account – something i’d find hard to believe. Another possibile, maybe more probable explanation would be that the sensor/guidance/upper-stage-steering system responded too slow, either due to a design flaw or an accidental malfunction.
Is there any official statement on that particular matter by the South Koreans?
P.S.: Josh: Well, this is rocket science…
Jochen,
It is a dynamic perturbation, as far as the guidance system is concerned, since the direction of the mass axis changes as the propellant is burnt.
Geoff:
Don’t get me wrong – that’s why i wrote ‘stationary’ and ‘dynamic’ in quotation marks.
My point is: in such a ‘fixed’ asymmetric case without additional mass fluctuations (other than burn-related mass-flow), especially in lateral direction (like sloshing propellants or a wobbling payload), i’d expect a decaying oscillation, not an increasing one, unless something’s wrong with the guidance or steering system (my guess: perhaps too slow actuators?). Otherwise, the guidance system would simply choose a thrust vector according to the new/misplaced center of gravity (which will not shift extremely fast due to engine function), if that is still in the range of possible thrust vectors (and if not, we wouldn’t see an oscillation, but rather a wildly somersaulting upper stage). Any oscillations should die off rather quick (perhaps even asymptotically, if the steering system is swift enough). If not, well, then i’d strongly suspect that something in the loop reacted too slow (or alternatively, as you suggested, that somebody forgot about adequate damping – which would be a rather ridiculous beginner’s mistake in my eyes, especially considering that the Russians were co-designing that launcher).
Well, a shorter rocket is going to have a higher natural frequency. So, if there’s going to be an instability, it’s going to be after separation.
At some point during the separation, the second stage servo has to turn on and I sort of doubt that they would let the second stage initial motor pointing be set to some wild number based on the unexpected steering output of the first stage servo. So, might this not just be a function of some gain scheduling built into the control loop’s turn on ramp up under a very unbalanced situation?
Control loop had a different mass/moment of inertia to deal with, perhaps requiring the initial amount of angular displacement of the nozzle for a given correction to be greater. As a result, the initial correction was insufficient and it takes additional correction (times time) to get to where it should be. At this point, the additional moment of inertia carries the stage through the desired attitude towards the other side. Rinse and repeat.
After some thinking, i’m beginning to ask myself: what if there was indeed an additional lateral mass fluctuation to foment that oscillation?
What if that shroud-half wobbled, either due to the botched separation process or because of engine-induced vibration, or because of lack of stiffness, mass inertia and the maneuvering itself?
The tip of that shroud would have had a rather large lever (like a swinging pendulum!), see:
!http://www.b14643.de/Spacerockets_1/Rest_World/KSLV/KSLV-1/Gallery/KSLV_8.jpg!
Even only a slight deformation would have resulted in a significant disturbance moment – which would have had relatively little influence as long as most of the mass was still concentrated in the solid-rocket booster, but would grow in impact the less overall mass the upper stage would have, while at the same time the overall center of gravity would move forward (thus higher and higher thrust-vector angles would have been required over burn-time to compensate for that cyclic disturbance).
I think this would quite elegantly explain the observed, increasing over burn-time, oscillation – and, as a side effect, there would not be two different sources of error (failed shroud separation plus an additional glitch in the guidance/steering system) to explain that behaviour, but only a single one: the uncomplete separation of the payload shroud.
The rocket equivalent of what motorcyclists call a “tank-slapper”.